Hallo zusammen,
Zunächst die Hardware:
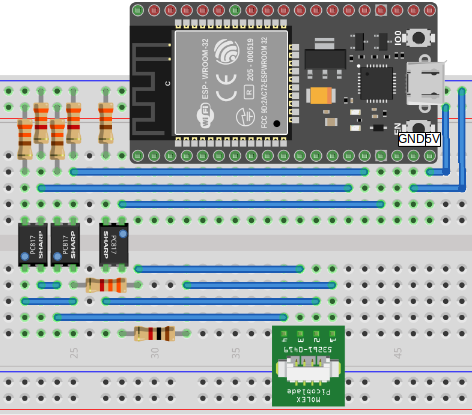
Die Schaltung habe ich mal mit Fritzing erstellt und sieht so aus.
Die ersten beiden Kontakte auf dem ESP sind beschriftet und liefern 5V und Masse. Die weiteren sind GPIO 12, 14 und 33.
Die Funktion ist dann ganz einfach:
[ul]
Bei Interesse kann ich auch gerne die ino-Datei posten. Und wie gesagt: Fragen und Anregungen gerne.
1 „Gefällt mir“
Glaub mir, du willst davor noch eine UAP1 haben und diese dann steuern:
Alleine wegen den idempotenten Befehlen hoch und runter…
ne, geht auch ohne. Das Geld kann ich sparen. Ich hab es ausprobiert. Die Schaltung funktioniert.
etwas selbst zu bauen
das möglichst kostengünstig zu realisieren. (Die Schaltung kostet nur 10€)
Auch wenn die Schaltung funktioniert, würde mich interessieren, ob sie fachmännisch korrekt aufgebaut ist. Oder ob man das auch einfacher oder besser realisieren kann.
Viele Grüße
1 „Gefällt mir“
Was mir so direkt ins Auge springt, wozu die Pulldown-Widerstände? Der ESP32 sollte eigentlich in der Lage sein, seine GPIOS high oder low zu ziehen.
Also, schaden tut’s wohl auch nicht, aber mich würde interessieren warum du sie eingebaut hast
Ah, ich sehe gerade, die sind ja bei den Eingängen. Dann macht’s schon Sinn.
Hast du den ESP mal in den Antrieb verbaut? Ich meine das das nur nach unten und nach vorne nicht mit Metal abgeschirmt ist. Oder willst du am ESP ne Externe Antenne anbauen?
Momentan habe ich die Schaltung noch im Fensterbrett liegen. Kontakt zum Accesspoint ist dort auch ohne Zusatzantenne sehr stabil. Ich gehe aktuell davon aus, dass es auch mit Gehäuse stabil funktioniert. Mein Hörmanngehäuse ist allerdings 3-seitig Kunststoff
1 „Gefällt mir“
sokkederheld:
Was mir so direkt ins Auge springt, wozu die Pulldown-Widerstände? Der ESP32 sollte eigentlich in der Lage sein, seine GPIOS high oder low zu ziehen.
Also, schaden tut’s wohl auch nicht, aber mich würde interessieren warum du sie eingebaut hast
Ah, ich sehe gerade, die sind ja bei den Eingängen. Dann macht’s schon Sinn.
Danke für´s Draufgucken. Genau mit den Pulldown-Widerständen war ich unsicher.
1 „Gefällt mir“
oldman
7. August 2022 um 10:31
8
Hallo Siberstreif,
ich habe diesen Eintrag mit den unseeligen Hörmann– Steuerungen gefunden und halte Deinen Ansatz für den Besten!
Könntest Du bitte Deine Arbeit veröffentlichen?
Du würdest einen alten Mann sehr glücklich machen
Vielen Dank!
Gruß,
OldMan
kein Problem. Die Hardware habe ich oben ja bereits veröffentlicht. Hast du diese bereits nachgebaut?
oldman
9. August 2022 um 07:07
10
Hallo Silberstreifen,
Danke!
Ich finde es von Hörmann extra shice, das die nur einen „Zustand-Wechsel-Dich“ - Knopf bieten… und für „kleines Geld“ die Standard-Taster als extra-Box anbieten - Die Box kostet mehr, als die ganze Hörmann-Steuerung wert ist.
Danke!
Gruß,
OldMan
ich befürchte, dass es ohne Programmierkenntnisse für dich eng wird, auch wenn ich den Code gerne zur Verfügung stelle. Der Code muss aber auf dein Garagentor angepasst werden. Da musst du dann ein wenig an den Parametern drehen. Gucke mal, ob das für dich passt.
#include <WiFi.h>
#include <ESPmDNS.h>
#include <ArduinoOTA.h>
#include <MQTT.h>
// -----------------------------------------------------------------------------------------
// Statusvariablen
// -----------------------------------------------------------------------------------------
unsigned long statusSend = 0;
unsigned long statusTarget = 0;
unsigned long doorStart = 0;
unsigned long doorOpen = 0;
unsigned long doorSend = 0;
unsigned long statusRec = 0;
unsigned long rebootTarget = 600000;
int doorSwitch = 0;
int doorRun = 0;
int calUp = 74;
int calDown = 50;
int TargetDir = 0;
// -----------------------------------------------------------------------------------------
// Definitionen für den Programmablauf
// -----------------------------------------------------------------------------------------
#define MotorAuf 33
#define MotorZu 14
#define Taster 12
bool Merker[50];
String LogMessage = "";
// -----------------------------------------------------------------------------------------
// Definitionen WIFI und MQTT
// -----------------------------------------------------------------------------------------
String Topic = "Garagentor";
const char* host = "Garagentor";
const char* wifi_ssid = "meinSSID";
const char* wifi_key = "ganzGeheim!";
const char* mqtt_host = "192.168.2.3";
WiFiClient wifi_client;
MQTTClient mqtt_client(512);
// *****************************************************************************************
// connectWIFI
// *****************************************************************************************
void connectWiFi() {
Serial.print("Connecting to WiFi: ");
Serial.println(wifi_ssid);
WiFi.begin(wifi_ssid, wifi_key);
int tries = 0;
while (WiFi.status() != WL_CONNECTED) {
if(tries++ > 10)return;
delay(1000);
Serial.print(".");
}
// Good. We have WiFi now!
Serial.println(" Success!");
}
// *****************************************************************************************
// connectMQTT
// *****************************************************************************************
void connectMQTT() {
if(WiFi.status() != WL_CONNECTED) return;
// Connect to MQTT server
Serial.print("Connecting to MQTT server: ");
Serial.println(mqtt_host);
int tries = 0;
while (!mqtt_client.connect(host, "", "")) {
if(tries++ > 10)return;
delay(5000);
Serial.print(".");
}
Serial.println(" Success!");
mqtt_client.subscribe(Topic+"/reset");
mqtt_client.subscribe(Topic+"/open");
mqtt_client.subscribe(Topic+"/close");
mqtt_client.subscribe(Topic+"/switch");
}
// *****************************************************************************************
// messageReceived
// *****************************************************************************************
void messageReceived(String &topic, String &payload) {
Serial.println("incoming: " + topic + " - " + payload);
if(topic == Topic+"/reset"){
ESP.restart();
}else if(topic == Topic+"/switch"){
digitalWrite(Taster, (payload == "true")?HIGH:LOW);
}else if(topic == Topic+"/close"){
TargetDir = 2;
digitalWrite(Taster, HIGH);
mqtt_client.publish(Topic+"/TargetDir", String(TargetDir));
}else if(topic == Topic+"/open"){
TargetDir = 1;
digitalWrite(Taster, HIGH);
mqtt_client.publish(Topic+"/TargetDir", String(TargetDir));
}
}
// *****************************************************************************************
// setup()
// *****************************************************************************************
void setup() {
// -----------------------------------------------------------------------------------------
// WIFI und MQTT starten
// -----------------------------------------------------------------------------------------
WiFi.mode(WIFI_STA);
WiFi.hostname(host);
mqtt_client.begin(mqtt_host, wifi_client);
mqtt_client.onMessage(messageReceived);
connectWiFi();
connectMQTT();
// -----------------------------------------------------------------------------------------
// OTA starten
// -----------------------------------------------------------------------------------------
ArduinoOTA.setHostname(host);
ArduinoOTA.setPassword("ich liebe OTA!");
ArduinoOTA.begin();
// -----------------------------------------------------------------------------------------
// Hardware initialisieren
// -----------------------------------------------------------------------------------------
pinMode(MotorAuf,INPUT);
pinMode(MotorZu, INPUT);
pinMode(Taster, OUTPUT);
}
// *****************************************************************************************
// loop()
// *****************************************************************************************
void loop() {
// -----------------------------------------------------------------------------------------
// OTA-Abfrage
// -----------------------------------------------------------------------------------------
ArduinoOTA.handle();
// -----------------------------------------------------------------------------------------
// WiFi
// -----------------------------------------------------------------------------------------
if(WiFi.status() != WL_CONNECTED){
WiFi.disconnect();
delay(100);
connectWiFi();
}
// -----------------------------------------------------------------------------------------
// MQTT
// -----------------------------------------------------------------------------------------
if(!mqtt_client.connected())connectMQTT();
mqtt_client.loop();
// -----------------------------------------------------------------------------------------
// Stati senden
// -----------------------------------------------------------------------------------------
// **********Motor läuft in Richtung auf
bool tmpMotorAuf = digitalRead(MotorAuf);
if(Merker[MotorAuf] != tmpMotorAuf){
Merker[MotorAuf] = tmpMotorAuf;
doorStart = millis() - doorOpen/calUp;
if(Merker[MotorAuf]==HIGH){
doorRun = 1;
}else{
doorRun = 0;
}
mqtt_client.publish(Topic+"/doorRun", String(doorRun));
statusTarget = 500;
// ---------Bei Wende am unteren Anschlag auf 0% setzten
delay(250);
if(digitalRead(Taster)==HIGH){
digitalWrite(Taster, LOW);
}else{
doorStart = millis();
}
if(TargetDir != 0 && TargetDir != doorRun){
delay(300);
digitalWrite(Taster, HIGH);
}else{
TargetDir = 0;
}
}
if(tmpMotorAuf==HIGH){
if(millis() - doorStart >= 10){
if (doorStart > 0){
doorOpen = (millis() - doorStart)*calUp;
if(doorOpen > 1000000)doorOpen = 1000000;
}
}
}
// **********Motor läuft in Richtung zu
if(Merker[MotorZu] != digitalRead(MotorZu)){
Merker[MotorZu] = digitalRead(MotorZu);
doorStart = millis() + doorOpen/calDown;
if(Merker[MotorZu]==HIGH){
doorRun = 2;
}else{
doorRun = 0;
}
mqtt_client.publish(Topic+"/doorRun", String(doorRun));
statusTarget = 500;
if(digitalRead(Taster)==HIGH){digitalWrite(Taster, LOW);}
if(TargetDir != 0 && TargetDir != doorRun){
delay(300);
digitalWrite(Taster, HIGH);
}else{
TargetDir = 0;
}
}
if(digitalRead(MotorZu)==HIGH){
if(millis() - doorStart >= 10){
if (doorStart > 0){
doorOpen = (doorStart - millis())*calDown;
if(doorOpen > 1000000)doorOpen = 0; //unsigned long kann keine negativen Werte;
}
}
}
// **********Taster
if(Merker[Taster] != digitalRead(Taster)){
if(digitalRead(Taster)==HIGH){
doorSwitch = 1;
}else{
doorSwitch = 0;
}
mqtt_client.publish(Topic+"/switch", digitalRead(Taster)?"true":"false");
Merker[Taster] = digitalRead(Taster);
}
// -----------------------------------------------------------------------------------------
// regelmäßig Status senden
// -----------------------------------------------------------------------------------------
if(abs(millis() - statusSend) >= statusTarget){
statusSend = millis();
mqtt_client.publish(Topic+"/RSSI", String(WiFi.RSSI()));
mqtt_client.publish(Topic+"/doorOpen", String(doorOpen/10000));
mqtt_client.publish(Topic+"/doorRun", String(doorRun));
int doorState = (doorOpen > 30000)?2:0;
if(doorRun == 1){doorState = 3;}else if(doorRun == 2){doorState = 1;}
mqtt_client.publish(Topic+"/doorState", String(doorState));
mqtt_client.publish(Topic+"/switch", digitalRead(Taster)?"true":"false");
if((doorRun > 0)||(doorSwitch==1)){statusTarget = 1000;}else{statusTarget = 60000;}
}
}
Ich habe versucht, den Code hilfreich zu kommentieren. Damit man da besser durchsteigt.