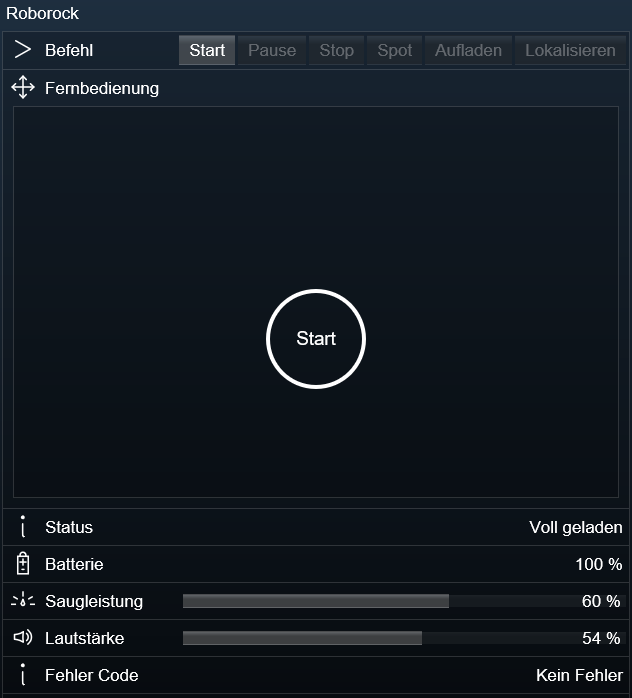
Mit dem Modul ist es möglich einen Roborock Staubsauger Roboter (Xiaomi) von IP-Symcon 4.3 aus zu steuern.
Funktionen:
[ul]
[li]Start / Stop / Pause der Saugfunktion
[/li][li]Spotcleaning
[/li][li]Zurückfahren an die Aufladestation
[/li][li]Timer anzeigen und setzten (noch zu ergänzen)
[/li][li]Remote Fernsteuerung
[/li][li]Einstellen der Lüfterleistung
[/li][li]Einstellen der Lautstärke
[/li][li]Lokalisieren des Saugers
[/li][li]Do not Disturb Mode (DND) ein / auschalten und Zeiten einstellen
[/li][li]Anzeige von:
[/li]
[li]gereinigte Fläche
[/li][li]Summe gereinigte Fläche
[/li][li]Reinigungszeit
[/li][li]Summe der Reinigungszeit
[/li][li]Batterieleistung
[/li][li]Anzahl der Reinungen
[/li][li]Übersicht letzte Reinigungen
[/li][li]Ansicht des Verbrauchsstatus der verbrauchbaren Gegenstände (Haupt-, Seitenbürste, Filter, Sensoren)
[/li][li]Seriennummer
[/li][li]Hardware Version
[/li][li]Firmware Version
[/li][li]SSID vom verbundenen WLAN
[/li][li]lokale IP Adresse
[/li][li]Modellbezeichnung
[/li][li]MAC
[/li][li]Zeitzone
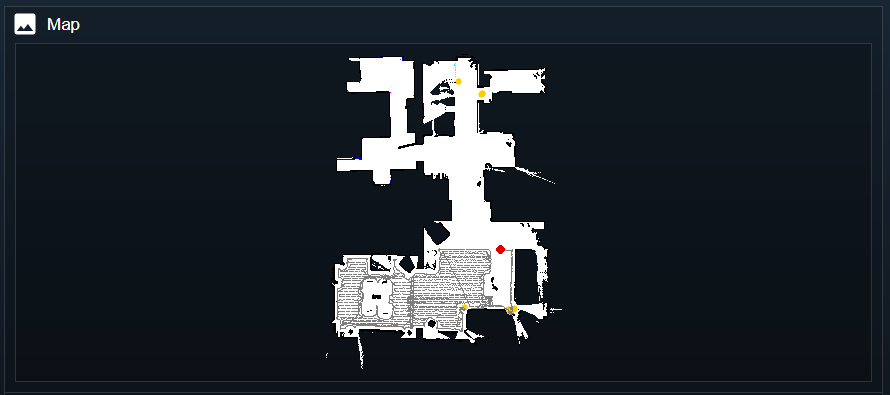
[/li][li]Karte (optional nur für gerootete Geräte verfügbar)
[/li][/ul]
Vorraussetzungen:
[ul]
[li]IP-Symcon 4.3
[/li][li]MI App (Xiaomi)
[/li][li]Roborock Staubsauger Roboter (Xiaomi) Version 1 oder Version 2
[/li][/ul]
Installation
Die IP-Symcon (min Ver. 4.3) Konsole öffnen. Im Objektbaum unter Kerninstanzen die Instanz Modules durch einen doppelten Mausklick öffnen.
In der Modules Instanz rechts oben auf den Button Hinzufügen drücken.
In dem sich öffnenden Fenster folgende URL hinzufügen:
https://github.com/Wolbolar/IPSymconRoborock
und mit OK bestätigen.
Anschließend erscheint ein Eintrag für das Modul in der Liste der Instanz Modules.
Vielen Dank für dieses Modul ich bin schon ganz gespannt wie es läuft.
Ich habe gesehen das man die IP auch durch die Datenbank erhalten kann.
Eventuell einfacher als in der App, der Eintrag ZLOCALIP.
Bei der Aktivierung Skripte erstellen bekomme ich den Fehler Komponente mit der Bezeichnung EditItemnotification_instance existiert bereits
Ich mache es noch einmal ohne die Skripte, da gab es den Fehler noch nicht.
Gruß Daniel
Was ihr beiden hier abgeliefert habt ist der Hammer, genau auf das habe ich gewartet…
Installiert, konfiguriert, läuft -> Top, allergrößten Respekt an euch beide!!
Der Kartenupload funktioniert super!
Drei Punkte noch:
Vielleicht könntet ihr in der Anleitung zur Einrichtung des Kartenuploads noch 2 Sachen ergänzen:
Danke für den Hinweis, habe ich ins Bashscript hinzugefügt. War irgendwie davon ausgegangen, das curl bereits vorinstalliert war. Das hatte ich bei mir scheinbar unbewusst als erstes installiert
Werde ich gleich noch in die Doku mit aufnehmen. Das könnte man zwar auch automatisch über das Bashscript erledigen lassen, aber das sollte jeder für sich selber entscheiden.
Korrekt, werde ich auch noch mit aufnehmen, danke!
Ansonsten hatte ich heute morgen den Mapuploader nochmal aktualisiert, hier wird die Karte nun sekündlich aktualisiert, sobald der Roboter gestartet ist.
Da muss man mal grundsätzlich sehen, das mit der Karte funktioniert, es ist aber eher zur Zeit was für fortgeschrittene Benutzer, nicht jeder will und ist in der Lage das Gerät rooten. Auch das mit dem Token ist noch nicht optimal, mal sehen ob es da noch eine bessere Lösung gibt, das einfacher für jeden in Betrieb zu nehmen. Hauptsache es funktioniert erst mal, Verbesserungen kann man ja immer noch einbauen wenn mal Zeit ist. Falls noch irgendwas auffallen sollte bzw. noch was fehlt bitte Rückmeldung geben.
Ja das hast Du richtig beobachtet, das hatte ich wohl einfach übersehen, weil ich Timer drinnen stehen hatte. Schau mal ob der Fehler nach einem Update weg ist.
Kannst Du irgendwie einschränken wann das genau auftritt, korreliert da ein bestimmter Eintrag zeitlich im Debug Fenster der Instanz mit dem Log Eintrag im Meldungsfenster?
Ja das kann sein, wobei das schon komisch ist, da kommt bei mir ein Wert zurück und auch keine Fehlermeldung. Wird denn bei Dir der Lautstärke Wert in der Variable dann auch nicht aktualisiert?
Mache doch mal ein Update und schau ob der Fehler weg ist, voraus gesetzt das war wirklich die Ursache. Welcher Sauger ist das denn und welche Firmware?
so, Update gemacht! Fehler ist erst mal weg.
Die Variable „Lautstärke“ wird aber nicht aktualisiert…(wurde sie auch vorher nicht!)
Wenn ich die Lautstärke übers WF ändere kann ich den Fehler wieder erzeugen. Auswirkungen auf die Lautstärke des Saugers hat es aber nicht. Egal ob 1% oder 100%, die Lautstärke bleibt gleich.
Das hätte mich auch sehr gewundert, wenn die grundsätzlich aktualisiert wurde. Bei Dir kommt ja schließlich unkown_method als Antwort und kein Wert, dementsprechend kann auch kein Wert abgespeichert werden.
Das merkwürdige ist, dass bei mir z.B. die Lautstärke als Wert übergeben wird, ich bekomme auch keine Fehlermeldung. Also scheint bei Deinem Sauger die Funktion einfach nicht zu funktionieren, warum auch immer.
Das ist ja die direkt Folge wenn der Sauger die Methode nicht kennt, dann ändert sich da auch nichts, die Frage ist nur warum das bei Deinem Sauger so ist. Eventuell meldet sich ja noch jemand mit ähnlicher Konstellation, bei mir geht es zumindest und ich wüste zur Zeit auch keine Lösung das bei Dir zu beheben, außer bei Dir die Lautstärke Einstellung einfach nicht zu nutzten. Mein Sauger hat Firmware 3.3.9_001111, eventuell hängt das ja auch einfach mit der Firmware des Saugers zusammen.
Hab gestern noch die 3.3.9_003096 auf den Sauger geladen und siehe da, die Var der Lautstärke wird aktualisiert. War also doch ein Firmware Thema.
Was noch nicht geht ist die Lautstärke auch wirklich zu steuern. Evtl hilft mal ein Neustart von IPS…