Dokumentation
IPS-868
Das IP-Symcon Funksystem 868 ergänzt mit seinen bidirektionalen Funkkomponenten Anwendungsbereiche, die von anderen Systemen oft nicht zufriedenstellend abgedeckt werden. Hierzu zählen die Verbrauchserfassung per S0-Eingang, die Anwesenheitskontrolle per AnwesehenheitsKontrollModul mitsamt Tracker, die Analyse der Raumluft via LuftGüteSensor, sowie die Ansteuerung von LED-Stripes.

Folgende Geräte werden von IP-Symcon unterstützt:
Inhalt
Installation
Das USB Gateway wird per USB mit dem PC verbunden. Die notwendigen Treiber stehen bei SiLabs zum Download bereit. Nach dessen Installation ist das Gateway einsatzbereit.
Das LAN Gateway wird per LAN mit dem PC verbunden. Standardmäßig ist DHCP und Port 5000 eingerichtet. Sollte eine individuelle IP Adresse gefordert sein, so wird das IP-Symcon "Network Configuration Tool" benötigt. Dieses steht zum Download bereit. Eine einfache Beschreibung zur Konfiguration des Gateways steht zur Verfügung. Im Anschluss ist das Gateway über die entsprechende IP-Adresse und Port erreichbar.
Wenn kein IP-Symcon Haus auf der Vorderseite des LAN-Gateways abgedruckt ist, ist dies ein altes Modell des Gateways. Die Installationsanleitung für dieses Modell kann hier gefunden werden.
Einbindung in IP-Symcon
Bei Verwendung des LAN-Gateways kann dies über die Gerätesuche eingebunden werden. Hierfür muss als System "IPS-868 Discovery" gewählt werden. Die Discovery-Instanz bietet dann die Erstellung eines IPS-868 Konfigurators an. Nachdem der Konfigurator erstellt wurde, können dort die einzelnen Geräte wie unten beschrieben eingebunden werden.
Das USB-Gateway wird direkt als Konfigurator angelegt, da es über die Gerätesuche nicht gefunden werden kann. Hierfür wird im Objektbaum ein "IPS-868 Configurator" erstellt. Bei der Konfiguration der Schnittstelle muss der Modus "IPS-868 USB Gateway" gewählt und anschließend der pasende Port ausgewählt und geöffnet werden.
Konfigurator
Über den IPS-868 Konfigurator können alle IPS-868-Geräte als Instanz erstellt werden. Dazu muss "Neues Gerät" aus der Liste ausgewählt und auf "Erstellen" geklickt werden.
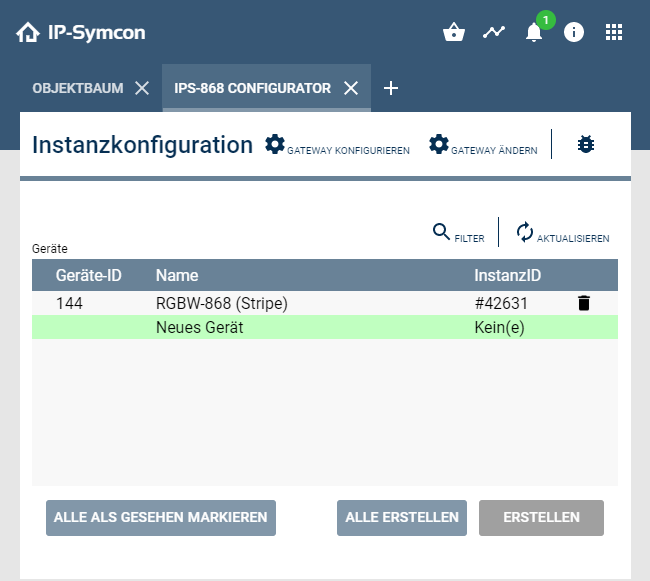
Neue Instanzen werden im Objektbaum in der Hauptkategorie erstellt. Diese erstellten Instanzen können dann entsprechend umbenannt und an anderer Stelle einsortiert werden. Über "Konfigurieren" kann ein neu eingelegtes Gerät konfiguriert werden.
Hier muss zum einen die Geräte-ID eingetragen und je nach Gerät möglicherweise noch weitere gereätespezifische Eigenschaften definiert werden. Das genaue Verfahren und die Geräte-ID kann der Dokumentation des jeweiligen Gerätes entnommen werden. (Geräteliste )
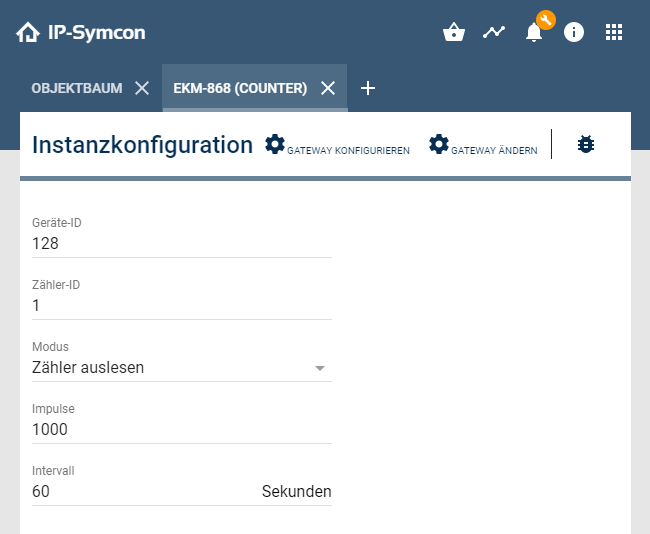
Konfiguration
Auf der Konfigurationsseite des Gerätes können verschiedene Eigenschaften eingestellt werden.
Diese können genauer beschrieben den jeweiligen Gerätedokumentationen entnommen werden.
| Geräte Instanz | Gerätbeschreibung |
|---|---|
| ACC-868 | ----------------------------------------------------------------------------------------------- |
| AKM-868 (Tracker) | AKM-868 |
| ANA-868 (Analog-Ausgang) | ANA-868 |
| ANA-868 (Analog-Eingang) | ANA-868 |
| DATA-868 | ----------------------------------------------------------------------------------------------- |
| EKM-868 (Counter) | EKM-868 |
| FD-868 (Display Input) | FD-868 |
| FD-868 (Display Output) | FD-868 |
| FD-868 (Display) | FD-868 |
| JKM-868 (LevelJET) | JKM-868-LevelJET |
| JKM-868 (ThermoJET) | JKM-868-ThermoJET |
| LGS-868 (Luftgütesensor) | LGS-868 |
| RGBW-868 (Stripe) | RGBW-868 |
| RGBW-868 (Stripe Input) | RGBW-868 |
| SERVO-868 | SERVO-868 |
| SERVO-868 (Input) | SERVO-868 |
| TFK-868 (Input) | ----------------------------------------------------------------------------------------------- |
| WDT-868 (WatchDog) | WDT-868 |